使用 Basic Stamp 2 微控制器與 Memsic 2125 雙軸加速度計量測傾斜角,透過 COM Port 與電腦連接,透過C#開發使用者介面,即時顯示雙軸傾斜角
1. 簡介
延續上一篇文章 [C#][Sensor]使用 Hitachi HM55B 電子羅盤,因為發文後反應不錯,因此介紹另一個感測元件 Memsic 2125。Memsic 2125 是由 Parallax 所研發的產品,可量測雙軸加速度或傾斜角。

圖1 Memsic 2125
2. 方法
2.1 Memsic 2125
Memsic 2125 可量測兩軸加速度或反推兩軸傾斜角;其原理可想像是一個裝有氣體的槽,如圖2所示,中間有一個小的加熱器,從加熱器向四周延伸並安裝小型溫度計,當氣槽往某一方傾斜時,加熱器因為地心引力的關係,仍然維持與地表水平面垂直向上蒸發,此時,四周的四個溫度檢測計,因為熱氣的接近,便會有不同的溫度變化,利用溫度變化的程度來換算物體傾斜的資料。
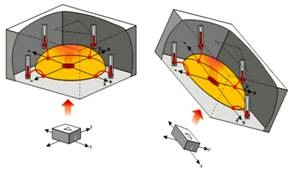
圖2 Memsic 2125 原理示意圖
2.2 硬體接線與程式碼
(1) 硬體接線
參考 Memsic 2125 Accelerometer Demo Kit (#28017) 內的接線
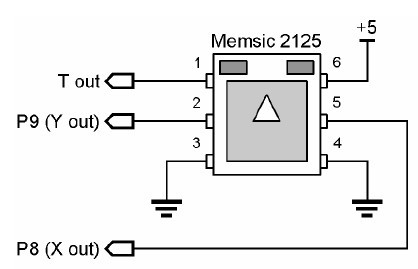
圖4 Memsic 2125 雙軸加速度計與 Basic Stamp 2 接線圖
(2) 程式碼
使用 Memsic 2125 Accelerometer Demo Kit (#28017) 內的範例程式碼,在此改了輸出部分,起始判斷字元 s 與結束判斷字元 e,X軸、Y軸傾斜角之間用 | 隔開;
例如X傾斜角為20度、Y軸傾斜角10度,則輸出為 s20|10e,讓後續透過 COM Port 讀入電腦時,容易做字串處理
' -----[ I/O Definitions ]-------------------------------------------------
Xin PIN 8 ' X input from Memsic 2125
Yin PIN 9 ' Y input from Memsic 2125
' -----[ Constants ]-------------------------------------------------------
' Set scale factor for PULSIN
#SELECT $STAMP
#CASE BS2, BS2E
Scale CON $200 ' 2.0 us per unit
#CASE BS2SX
Scale CON $0CC ' 0.8 us per unit
#CASE BS2P
Scale CON $0C0 ' 0.75 us per unit
#CASE BS2PE
Scale CON $1E1 ' 1.88 us per unit
#ENDSELECT
HiPulse CON 1 ' measure high-going pulse
LoPulse CON 0
DegSym CON 176 ' degrees symbol
' -----[ Variables ]-------------------------------------------------------
xRaw VAR Word ' pulse from Memsic 2125
xmG VAR Word ' g force (1000ths)
xTilt VAR Word ' tilt angle
yRaw VAR Word
ymG VAR Word
yTilt VAR Word
disp VAR Byte ' displacement (0.0 - 0.99)
angle VAR Byte ' tilt angle
' -----[ Program Code ]----------------------------------------------------
Main:
DO
GOSUB Read_Tilt ' reads G-force and Tilt
' display results
DEBUG "s",(xTilt.BIT15 * 13 + " "),
DEC ABS xTilt,"|"
DEBUG (yTilt.BIT15 * 13 + " "),
DEC ABS yTilt,"e"
PAUSE 200 ' update about 5x/second
LOOP
END
' -----[ Subroutines ]-----------------------------------------------------
Read_G_Force:
PULSIN Xin, HiPulse, xRaw ' read pulse output
xRaw = xRaw */ Scale ' convert to uSecs
xmG = ((xRaw / 10) - 500) * 8 ' calc 1/1000 g
PULSIN Yin, HiPulse, yRaw
yRaw = yRaw */ Scale
ymG = ((yRaw / 10) - 500) * 8
RETURN
Read_Tilt:
GOSUB Read_G_Force
disp = ABS xmG / 10 MAX 99 ' x displacement
GOSUB Arcsine
xTilt = angle * (-2 * xmG.BIT15 + 1) ' fix sign
disp = ABS ymG / 10 MAX 99 ' y displacement
GOSUB Arcsine
yTilt = angle * (-2 * ymG.BIT15 + 1) ' fix sign
RETURN
' Trig routines courtesy Tracy Allen, PhD. (www.emesystems.com)
Arccosine:
disp = disp */ 983 / 3 ' normalize input to 127
angle = 63 - (disp / 2) ' approximate angle
DO ' find angle
IF (COS angle <= disp) THEN EXIT
angle = angle + 1
LOOP
angle = angle */ 360 ' convert brads to degrees
RETURN
Arcsine:
GOSUB Arccosine
angle = 90 - angle
RETURN
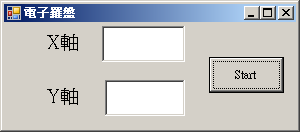
2.3 電腦端使用者介面
直接用上一篇文章 [C#][Sensor]使用 Hitachi HM55B 電子羅盤 的程式下去修改
(1) Form
(2) 程式碼
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
namespace WindowsFormsApplication4
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
delegate void SetTextCallback(string text);
private void serialPort1_DataReceived(object sender, System.IO.Ports.SerialDataReceivedEventArgs e)
{
string carray = serialPort1.ReadExisting();
SetText(carray);
}
private void btnStart_Click(object sender, EventArgs e)
{
serialPort1.PortName = "COM3";
serialPort1.BaudRate = 9600;
serialPort1.DataBits = 8;
serialPort1.StopBits = System.IO.Ports.StopBits.One;
serialPort1.Parity = System.IO.Ports.Parity.None;
serialPort1.ReadTimeout = 100;
serialPort1.Open();
}
private void SetText(string text)
{
try
{
if (this.txtX.InvokeRequired)
{
SetTextCallback d = new SetTextCallback(SetText);
this.Invoke(d, new object[] { text });
}
else
{
txtTemp.Text += text;
if (txtTemp.Text.Length < 10) { return; }
string[] strTempS = txtTemp.Text.Split('s');
if (strTempS.Length <= 1) { return; }
string[] strTempE = strTempS[1].Split('e');
if (strTempE.Length > 0)
{
string[] strAngle = strTempE[0].Split('|');
this.txtX.Text = strAngle[0];
this.txtY.Text = strAngle[1];
txtTemp.Clear();
}
}
}
catch
{
}
}
}
}3. 結果
影片為硬體 Basic Stamp 2 與 Memsic 2125 雙軸加速度計傾斜時,電腦即時接收到的X軸與Y軸傾斜角,並顯示於使用者介面上。
影片中先X軸方面傾斜,在往Y軸方向傾斜。
